27-空间变换—变换矩阵的本质
详解基向量
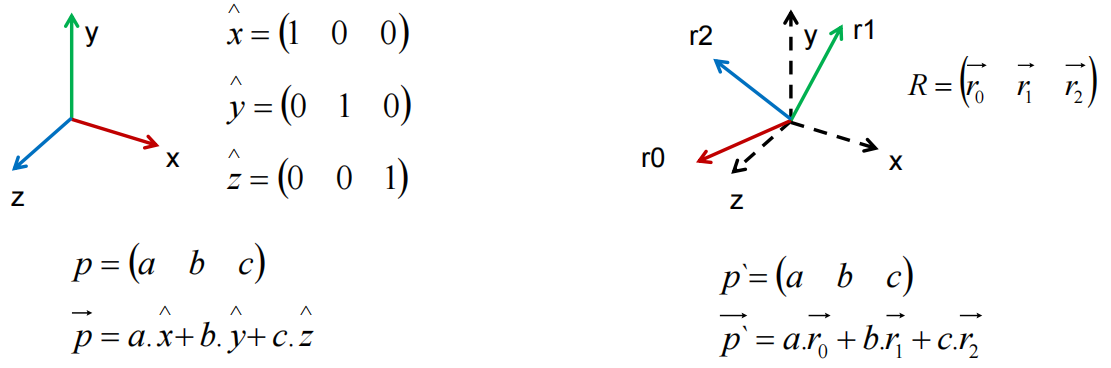
空间中的一组线性无关向量,即可构成一组基向量
点P的坐标只有放在某一个基向量构成的坐标系中才会有意义
局部坐标系与世界坐标系
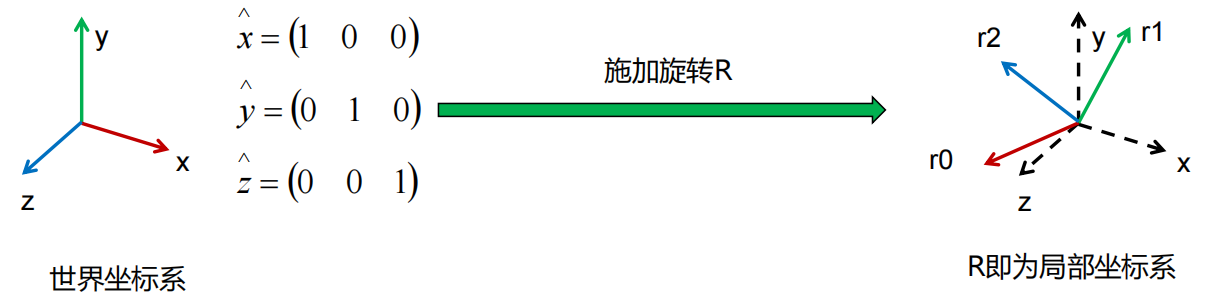
世界坐标系: 定义一组线性无关/模为1/互相垂直的向量,作为整个世界的中心坐标系(笛卡尔坐标系)
局部(模型)坐标系: 对世界坐标系的三个基向量进行变换后,得到的坐标系(一开始与世界坐标系重合)
点P局部坐标与世界坐标
世界坐标: 点P在世界坐标系中的坐标
局部(模型)坐标: 在转换后新形成的一组基向量构建的坐标系中点P的坐标
变换矩阵的相互作用
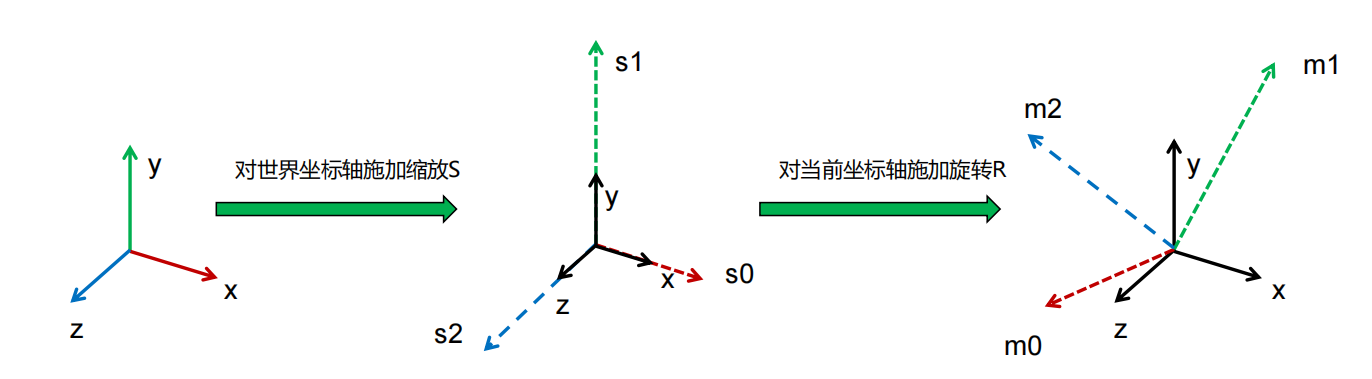
举例: 先使用S矩阵对坐标进行缩放,再使用R对其进行旋转
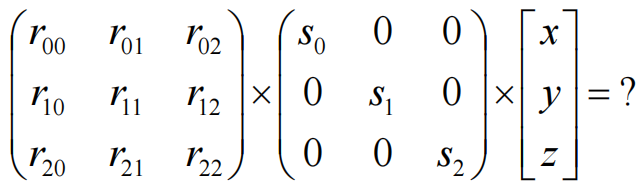
根据矩阵运算结合律,可以先把S与R相乘,再集体作用到目标点;二者相乘得到如下的矩阵M
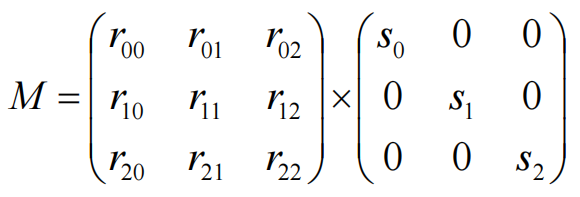
根据列视图可知S矩阵的每一列,都会作为一组调配因子对R中的列向量进行组合,坐标即调配因子:
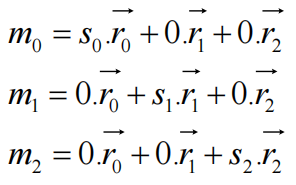
S的三个基向量构成一个局部坐标系,把S的三个基向量按照R进行旋转得到的就是M
S的三个基向量在R张成的坐标系中,坐标不变,但是在世界坐标系中发生了改变
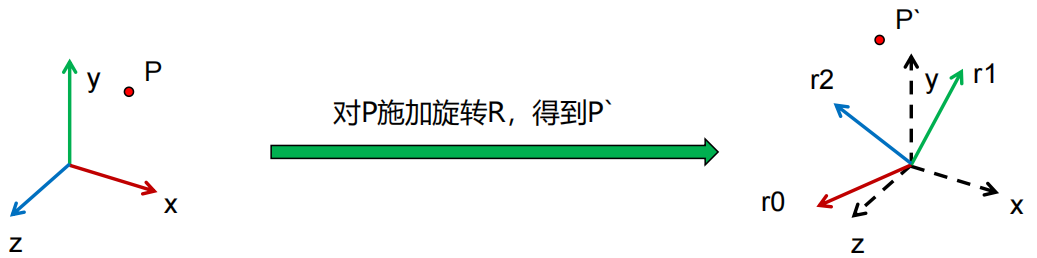
P`在局部坐标系的坐标仍然是(a,b,c)
P`在世界坐标系的坐标就是(a,b,c)对R张成的局部坐标系的三个基向量的调配

延申理解
对于如下连续矩阵变换:

抽出所有变换矩阵,如下表达:
相当于前方n-1个矩阵相乘,组成了一组基向量
最后Mn对F的每个基向量进行变换,形成最终M矩阵每个列向量,从而形成新的局部坐标系
结论
对一个矩阵A做变换B(矩阵相当于坐标系,作用于变换矩阵就是更改这个坐标系,坐标系上的某个点就一组列向量),相当于把A矩阵的每一个列向量做了B变换,形成一组新的基向量,按列排列形成M矩阵,最终用M的列向量为基,计算P点的世界坐标就是通过原世界坐标(因为点P相对于局部坐标不变,所以使用原世界坐标)来调配这个基向量得到P在世界坐标系中的新坐标;多变换相乘,即从右往左,逐步变更基向量的过程
All articles on this blog are licensed under CC BY-NC-SA 4.0 unless otherwise stated.